Уникальная технология рентгеновского контроля движущихся объектов в реальном времени ITSM (Improving of Testing Sensitivity in Motion)
с использованием программного комплекса DiSoft
При рентгеновском контроле часто на первое место выступает производительность. Например, при производстве газовых труб некоторые заказчики стали требовать 100% рентгеновский контроль при задании высоких требований к контрастной чувствительности контроля.
Контрастная чувствительность в свою очередь определяется отношением сигнал - шум
Основным источником шума на плоскопанельных детекторах является квантовый шум. Существует несколько способов уменьшения квантового шума
- Увеличение времени накопления. Это ведет к потере производительности
- Увеличение тока анода. Требуется более мощная, а значит более дорогая и тяжелая рентгеновская трубка, уменьшается срок службы рентгеновской трубки.
- Увеличением эффективности детектора, то есть увеличением толщины активной зоны детектора. Выбор более эффективного детектора ведет к потере пространственного разрешения.
- Уменьшение расстояния источник-детектор. При уменьшении расстояния источкик-объект увеличиваются геометрические искажения, и ухудшается пространственное разрешение.
- Уменьшение рассеянного напряжения за счет диафрагмирования пучка и построение правильной защиты от обратного рассеяния. Единственный пункт, которому надо следовать, не боясь последствий, если не считать нескольких тысяч евро, потраченных на вольфрамовый корпус детектора.
Если не брать во внимание рассеянное излучение, от которого можно эффективно избавиться, отношение сигнал шум (SNR) пропорционально следующему выражению:
где t – время экспозиции, I – ток трубки, R – расстояние источник-детектор.
Для детекторов, которые работают в режиме реального времени, при накоплении кадры суммируются, поэтому время экспозиции вычисляется как:
![]()
где Δt – время экспозиции одного кадра, N – количество просуммированных кадров.
Если объект не движется, контрастная чувствительность при фиксированной геометрии и источнике рентгена в широких пределах определяется временем накопления. Стандартный способ накопления сопряжен с остановкой движения объекта и снятием статического кадра.
Толщина металла 10 мм
Время накопления
1 кадр (40мс) 32 кадра (1.3 с) 2048 кадров (1 мин 30с)
Контраст хуже 4% Контраст 1% Контраст 0.5%


В большинстве случаев, при использовании современных плоскопанельных детекторов очень хорошая контрастная чувствительность получается при временах накопления около секунды и меньше.
В большинстве случаев на цикл движение-остановка-движение тратится основное время контроля. Требуется время на разгон-торможение и на затухание колебаний объекта после остановки.
Возникает вопрос, можно ли осуществлять подобное накопление при равномерном движении объекта мимо детектора? Вопрос интересен, еще и потому, что плавное движение объекта на многих предприятиях уже реализовано, причем много лет тому назад.
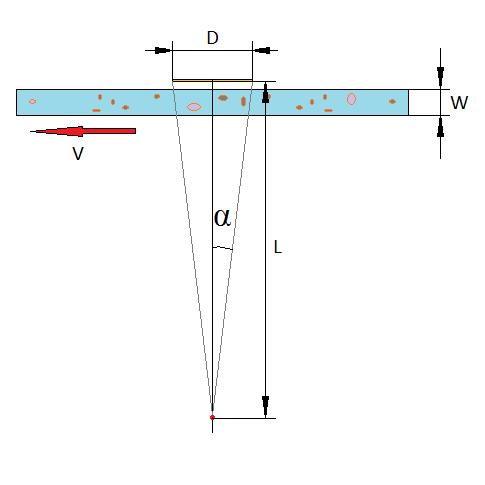
Пусть у нас стоит задача по просвечиванию продольного шва, в этом случае объект движется мимо пары излучатель-детектор со скоростью V.
Конфигурация 1
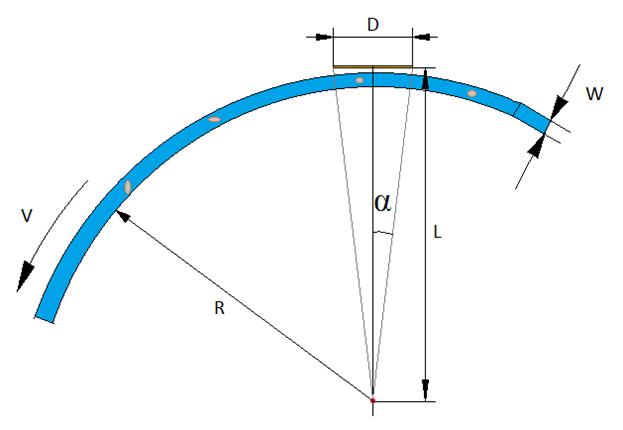
Вторая распространенная задача по просвечиванию кольцевого шва, в этом случае объект вращается вокруг фокуса трубки со скоростью V.
Конфигурация 2
Один и тот же срез образца проходит через разные линии сканирования детектора. Естественным образом можно предположить, что подобные срезы объекта можно интегрировать, тем самым уменьшая квантовый шум по мере продвижения объекта вдоль детектора.

Для конфигурации 1 срезы образца для разных линий сканирования детектора отличаются друг от друга.
Это накладывает требование на конфигурацию системы.
где W – толщина образца, – максимальный угол, требуемое – пространственное разрешение или
где L – расстояние источник-объект, D – размер активной части сенсора вдоль движения.
При заданном пространственном разрешении это накладывает ограничение на размер детектора.
Для конфигурации 2 при расположении фокуса трубки примерно в центре трубы данное ограничение отсутствует.
За время экспозиции объект контроля успевает сместиться относительно детектора и происходит размазывание деталей изображения по направлению движения.
Без движения
Движение 2 метра/мин
Размер смазывания определяется временем экспозиции одного кадра и скоростью движения объекта.
Точеный объект на объекте распределяется по N пикселям детектора.
![]()
Где ![]() Δt – время
экспозиции, P – размер пикселя.
Δt – время
экспозиции, P – размер пикселя.
Соответственно контраст объекта снижается в N раз.
Для большинства плоскопанельных детекторов время экспозиции обратно пропорционально частоте кадров.
![]()
Где f – число кадров в секунду.
Исключение могут составлять системы на основе сборки РЭОПа и видеокамеры с электронным затвором.
Например, при скорости движения объекта 4 метра/мин и частоте 25 кадров в секунду за время между кадрами объект смещается на 2.7 мм. При разрешении детектора в 200 микрон, это означает что точка на объекте «размазывается» по 13,5 пикселям, и контраст небольших объектов падает в 13.5 раз. Это накладывает ограничения на время экспозиции.
Иногда ситуация даже намного сложнее с учетом значительного лага, присущего некоторым типам плоскопанельных детекторов.
Тем не менее, в большинстве случаев функцию свертки размазывания статического изображения можно считать известной.
Еще недавно, задачи по высококачественному контролю движущихся объектов была почти не решаемой.
Но за последние годы произошли, можно сказать, революционные изменения в технике.
- Появились недорогие, детекторы с высокой эффективностью, хорошим пространственным разрешением и малым временем экспозиции, с частотой кадров до 300 кадров в секунду, способные передавать изображение на большое расстояние, иногда по беспроводным схемам.
- Стали доступны графические процессоры, ориентированные на высокоскоростную обработку изображений. Задачи по наложению любых линейных фильтров стали работать в реальном времени.
На основе использования этих технических новшеств компания ЦифРа разработала и успешно внедряет технологию ITSM (Improving of Testing Sensitivity in Motion).
Сейчас задача по контролю движущихся объектов может быть поставлена следующим образом:
- Контроль происходит на скорости. Задача дефектоскописта, при обнаружении подозрительного места, остановить объект контроля и сделать высококачественный кадр с накоплением и по этому кадру принять решение. Скорость объекта 4 метра в минуту и более, чувствительность контроля по стали 20 мм не хуже 1%.
- Контроль и получение изображения, для принятия решения происходят при движении объекта без остановки. Чувствительность контроля по стали 20 мм не хуже 1%, пространственное разрешение не менее 3 пар линий на мм.
В зависимости от постановки задачи выбирается конфигурация оборудования и рассчитывается максимальная скорость движения объекта.
Само движение объекта может иметь несколько степеней свободы, например, движение по осям X, Y и поворот относительно центральной оси.
Существует множество способов измерение координат объекта, как по датчикам, так и по относительному смещению самого рентгеновского изображения.
Технология включает в себя мощную математическую обработку сигнала, в том числе компенсацию смазывания на основе алгоритмов обратной свертки, работающих в реальном времени.
Исходное изображение
Смазанное изображение

Восстановленное изображение
Одним из последних успешных проектов компании ЦифРа по внедрению технологии ITSM стал проект по установке пяти рентгенотелевизионных систем на Выксунском Металлургическом заводе (ВМЗ).
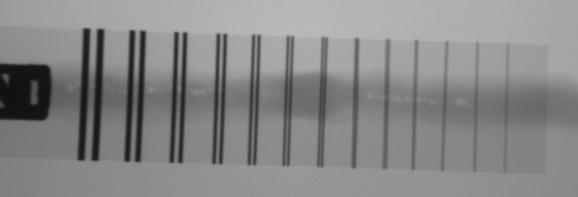
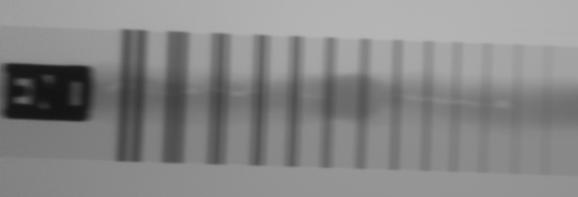
На рисунках приведен участок шва трубы 1020 со стенкой 16 мм и усилением шва 5 мм. Труба сканировалась со скоростью 4 м/мин. Достигнутая чувствительность составила 0.2 мм, то есть 1% от радиационной толщины. По техническому заданию требовалась видимость проволочки 0.32 мм.
Эталон №6

Эталон №10
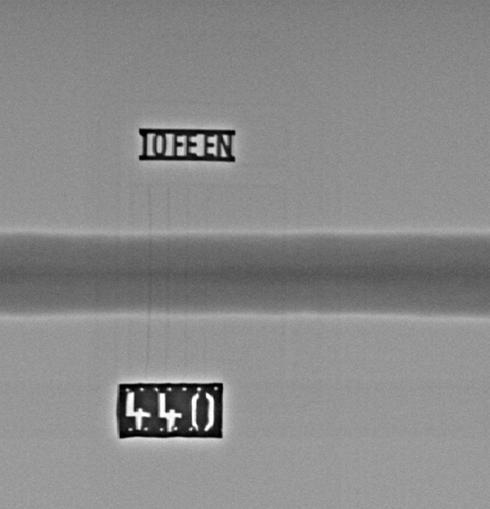
Хочется подчеркнуть, что речь идет сейчас о динамическом контроле. То есть в процессе получения этих изображений объект равномерно двигался мимо детектора и рентгеновской трубки на скорости 4 метра в минуту. Такое качество изображения получено благодаря новой технологии ITSM.